
Welding Robots
We offer robotic welding automation solutions for processes like arc welding, MIG welding, TIG welding, laser welding, spot welding, and more. By automating welding processes, companies are becoming more environmentally-friendly. Additionally, the process reduces inconsistent welds, supporting higher quality production.
Material Handling
TIE's material handling robot application include part selection and transferring, palletizing, packing, and machine loading, among others. Material handling robots can automate some of the most tedious, dull, and unsafe tasks in production line and is one of the easiest ways to add automation.

Assembly Robots
Assembly robots are used for lean industrial processes and have expanded production capabilities in the manufacturing world. An assembly line robot can dramatically increase production speed and consistency. They also save workers from tedious and dull assembly line jobs.

Material Removal Robot Applications
Material removal robots help manufacturers raise the safety level in their shops by getting workers away from harmful dust and fumes associated with this application.
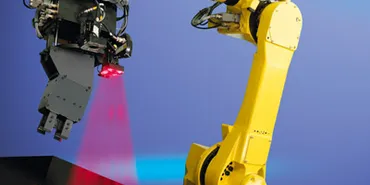
Vision Robots
While vision could be utilized for any robot application, currently, it is mostly used in material handling and material removal applications for accuracy in packaging, pick and place, deburring, grinding, etc.

Waterjet Robot Applications
Waterjet robots are used to cut, drill, and clean a variety of materials. The robotic end-of-arm-tooling directs the high pressure stream or jet of water. Waterjet robots are commonly used in several industries including aerospace, automotive, electronics, food, textile and packaging industries.

Palletizing Robots
Industrial palletizing refers to loading and unloading parts, boxes or other items to or from pallets. Automated palletizing refers to an industrial robot palletizer performing the application automatically.

Cleanroom Robots
Some products require clean room robots to be used in automated processes. A manufacturing cleanroom is an environment controlling levels of airborne particles, dust, vapors and moisture.

Collaborative Robots
Collaborative robots (cobots) were designed with multiple advanced sensors, software, and EOATs that help them swiftly and easily detect and adapt to any sort of intrusion into its work envelope.

Dispensing Robots
Using industrial robots for dispensing not only increases the speed at which items are released or poured, but also increases the accuracy of exact amounts. Robots can be fitted with specialized end of arm tooling, catering to the specific handling needs of your product.

Bonding / Sealing Robots
Bonding and sealing is a vital application for many different types of manufacturing markets today. Windows, cars, airplanes – they all have to be bonded or sealed during the manufacturing process.

Other
Other applications include, but are not limited to 3D Laser Vision Robots, Assembly Robots, Spindle Robots, and material removal applications such as grinding, cutting, deburring, sanding, polishing, routing.