Addressing Common Fanuc Robot Motor Failures: How to Diagnose
No manufacturer wants to experience downtime caused by a failed robot motor. When a motor stops performing as expected, production can come to a standstill, impacting schedules, quality, and overall productivity. While Fanuc robots are built for reliability, their motors operate under demanding conditions, making them susceptible to predictable wear patterns and electrical or mechanical stress.
Diagnosing Common Fanuc Robot Motor Failures
Recognizing early signs of failure allows maintenance teams to act before small issues become large-scale downtime events. Below are the most common failures found in Fanuc robot motors and how to identify them before they disrupt your production line.
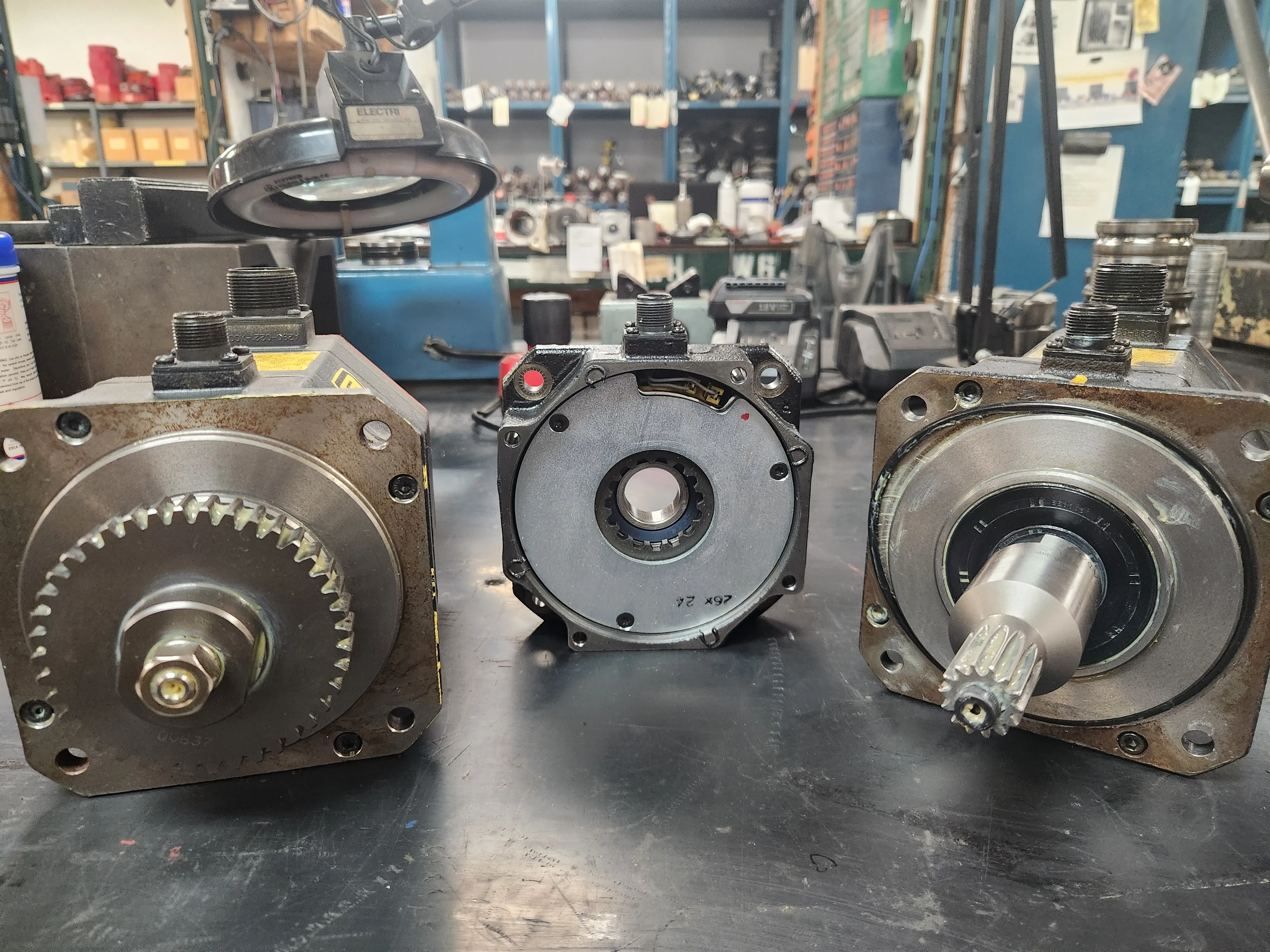
1. Brake Failure
Brake assemblies are one of the most frequent sources of robot motor issues. The motor’s holding brake is responsible for keeping the robot in position when powered down. Over time, mechanical wear or coil burnout can cause the brake to lose its holding power, leading to drift or instability.
What to look for:
- Robot arm movement when power is removed
- Failure to hold position during emergency stops
- Audible clicking, grinding, or delayed engagement
Brake assemblies are intricate and require specialized testing to verify mechanical and electrical performance. If these symptoms appear, the motor should be removed for professional evaluation before the issue worsens.
2. Bearing Wear or Failure
Bearings take on constant rotational loads and are among the most common mechanical failure points in robot motors. Continuous use, contamination, or imbalance can lead to bearing fatigue and eventual failure.
What to look for:
- Grinding or rumbling noises
- Excessive vibration or heat around the motor housing
- Irregular motion or torque fluctuations
Unchecked bearing wear can lead to secondary damage within the motor. Early detection and removal for inspection can prevent more extensive repairs later.
3. Encoder Malfunctions
Encoders provide the positional feedback necessary for precise robot movement. If an encoder becomes contaminated or physically damaged, it can disrupt communication between the motor and the controller.
What to look for:
- Inconsistent or inaccurate movement
- Servo alarms or “position deviation” errors
- Jerky or hesitant motion during operation
Because encoder signals are vital to robot performance, suspected feedback issues should be tested using proper diagnostic equipment to confirm the fault source.
4. Winding Insulation Breakdown
Motor windings rely on insulation to prevent short circuits and electrical leakage. Over time, exposure to heat, oil, and dust can degrade this insulation, leading to intermittent faults or complete motor failure.
What to look for:
- Blown fuses or tripped breakers
- Burnt odor or discoloration near terminals
- Irregular current readings or reduced output
Once insulation breakdown is suspected, electrical resistance testing is required to determine the extent of the damage and guide repair actions.
5. Stator or Rotor Damage
Mechanical or electrical stress can cause cracking, imbalance, or shorts within the stator or rotor assembly. These issues can drastically affect performance and create additional vibration throughout the robot arm.
What to look for:
- Humming or imbalance during operation
- Visible burn marks or deformation
- Sudden changes in torque or load readings
Rotor and stator damage often require precision balancing and rework that can only be performed in a controlled repair environment.
6. Overheating
Overheating is one of the leading contributors to robot motor failure. It can result from blocked ventilation, fan failure, or prolonged overload conditions.
What to look for:
- Elevated surface temperatures
- Heat discoloration or smell of overheated insulation
- Unexpected motor shutdowns
Thermal stress accelerates wear on bearings and windings, so motors showing consistent overheating should be promptly tested for underlying causes.
7. Cable and Connector Issues
Robot cables are subjected to constant flexing and movement, making them highly prone to fatigue over time. Damaged or oxidized connectors can also interrupt power or feedback signals.
What to look for:
- Intermittent operation or communication errors
- Burned, frayed, or pinched cable insulation
- Loose or corroded connector pins
Cable and connector faults can easily mimic motor or drive issues, making detailed inspection essential before replacement.
T.I.E. Industrial: Your Partner in Robot Motor Repair
At T.I.E. Industrial, our technicians specialize in diagnosing and repairing Fanuc robot motors across all major series and applications. Common issues such as brake assembly failure, bearing wear, or encoder signal faults are thoroughly evaluated using advanced diagnostic and load-testing equipment.
Each repaired or refurbished motor is electrically and mechanically tested to ensure it meets or exceeds OEM standards. With one of the largest inventories of Fanuc motors and components in stock and same-day shipping available for most replacements, T.I.E. Industrial helps manufacturers minimize downtime and restore production quickly.
When performance issues arise, don’t risk further damage with on-site troubleshooting. Send your motor to T.I.E. Industrial for expert diagnosis and professional repair—the trusted source for Fanuc robot motor reliability.
Contact Us!
Related Articles
You might be also interested in:
- Manufacturers
Understanding Error Codes in Fanuc Industrial Robots
As modern industries evolve, the role of robots in manufacturing and automation has become much more integral in operations. Companies rely heavily on this technology and cannot afford shutdowns in production if this sophisticated machinery relays errors. Understanding Fanuc robot error codes is crucial for maintaining productivity and ensuring safety in your manufacturing environment. Let’s explain some common Fanuc error codes, their meanings, and potential solutions to minimize or avoid downtime.
- Manufacturers
Mastering User Alarms in Fanuc Robotic Programming

- Manufacturers
Top of the Line: Fanuc Deburring Robots
Fanuc has been in the robotic industry for years, so it is no surprise that they are creating best in class robots such as the LR Mate 200iC robot. The LR Mate 200iC by Fanuc can locate and deburr a part using the optional iRVision and an FS-10iA Force Sensor. Furthermore, the Fanuc 200iC has a great wrist load capacity, repeatability, work envelope, and speed.

- Manufacturers
Robotic Revolution: How Fanuc Robots Put Thanksgiving Dinner on Your Table
Thanksgiving – a time for feasting and gratitude. Behind the scenes, Fanuc robots play a pivotal role in bringing this festive meal to your table. At T.I.E. Industrial, we provide refurbished Fanuc robots that are integral to this process. This blog will delve into the various applications of these robots in Thanksgiving food preparation and the importance of food-grade robotics.

- Manufacturers
Fanuc Collaborative Robots: The Mini Series
Fanuc now offers a collaborative mini-series with the CR-4iA, the CR-7iA, and the CR-7iA/L extended reach. Collaborative robots can work side by side with human workers without the need for any safety fencing. Furthermore, they are small and flexible, saving you on floor space and money. Contact Robots.com experts today to start the integration of a Fanuc collaborative robot from the mini series.

- Manufacturers
Thriving in Tough Terrain: Refurbished Fanuc Robots in Hazardous Environments
In the industrial world, conquering hazardous environments and challenging terrains is an everyday endeavor. From extreme temperatures to exposure to harmful chemicals or confined spaces, precision, safety, and efficiency are paramount. This blog will explore how refurbished Fanuc robots serve as the ultimate solution for these demanding conditions. We will also delve into some typical hazardous environments and applications where these robots shine, providing valuable insights into their remarkable versatility, along with various model numbers.